Recently we have been trying to build a Self Balancing Two-Wheeled Skateboard. We have the Accelerometer/Gyroscope hooked up to an adruino, and a 25A, 35o watt motor. You can see the gyroscope controlling the motor in the video below. Unfortunately, the wheels have been on back order, and haven’t come in yet.
You may also like

The nice folks over at Tekton sent us a pallet full of hand tools! To be more precise they sent us on of each […]

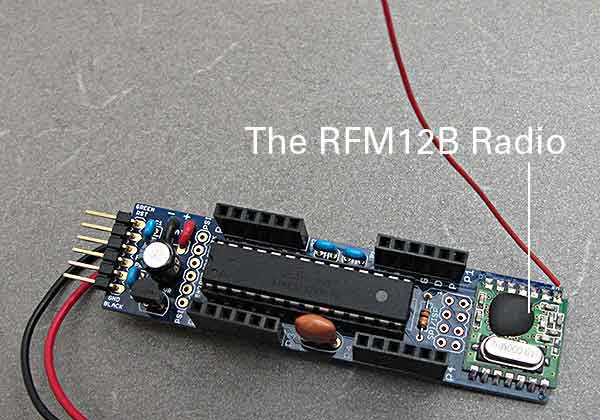
I have been playing around with the JeeNode by JeeLabs recently, a Arduino clone designed for sensor networks. Their primary feature is […]

Come out at 7:00pm, Thursday, April 25th for an introduction to using a 3d printer. Node member Todd Blatt of Custom 3d Stuff […]

{kind=link}
{kind=link}
{kind=link}
What: The High Zero Festival of Experimental Music presents a Shnth Workshop with Peter Blasser in which participants assemble their own Shnth, […]